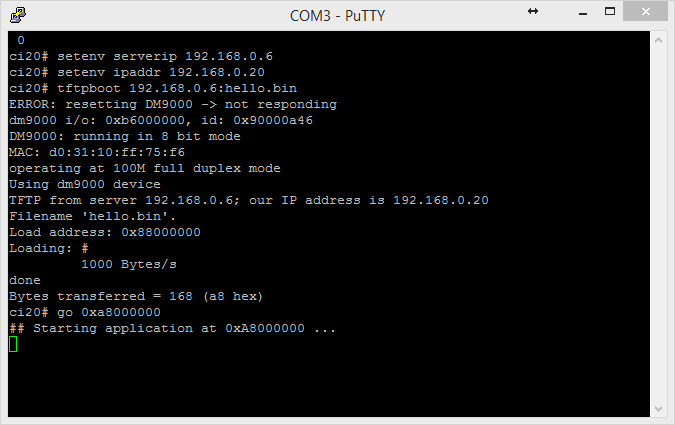
For the last three weeks, we have been working towards completing the MIPS target architecture library. Finally this week, all the IL to ASM conversions have been added to the compiler. The implementations have been tested and we can confirm that we have compiler support for the MIPS32 processor architecture. So how did the testing go?
Testing
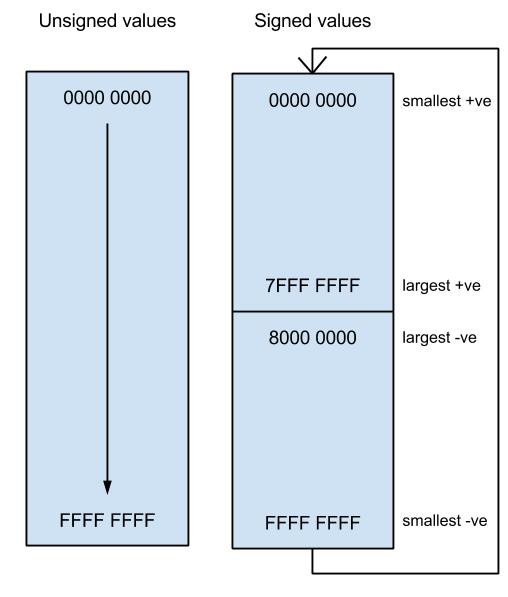
Some operations are fairly simple to test along the way, such as Add, Sub, Mul, Div, Shl etc., i.e. operations that use value types, since all we need to check is the result produced by a particular IL operation. The correctness of these operations can easily be verified without the need for a complete library. This is not the case for more complex operations, such as the ones related to objects, arrays and strings, i.e. reference types.
In order to check whether reference types function correctly, many different IL operations have to be implemented (NewObj, InitObj, Ldobj, Isinst etc), so we did not start testing these until the whole library was completed. The functionality of objects can be tested by creating a test class with some methods and fields within it. If these types initialise as expected then we can try to create a new instance of the class. If all these have been a success then we can test whether values passed to the class from outside return to the calling environment correctly. The testing of arrays and strings is a little more straight forward. In order to test arrays and strings, we can try to declare a new instance of these types and apply some basic array or string related manipulation to them and inspect the results.
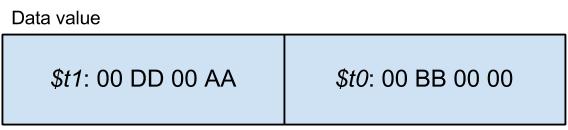
During the testing process, some issues were uncovered. These issues were mainly related to the differences between the x86 and the MIPS architectures. On MIPS, only values contained in registers can be pushed onto the stack, while x86 lets the programmer push labels and immediate values directly, this is not available on MIPS. This is due to the CISC vs RISC architecture differences between x86 and MIPS. On MIPS, if we want to push a label onto the stack, we must first load the address of that label into a register, using the La instruction and then push that value from the register onto the stack. The same is true for immediate values; first we must move the value into a register then finally push that register onto the stack.
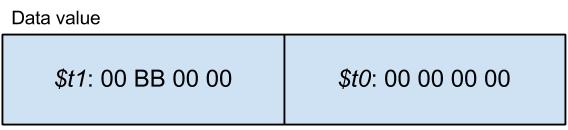
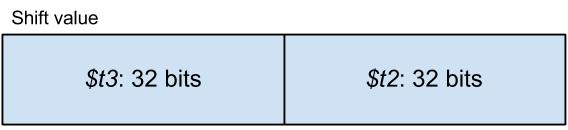
In many cases it is required to push the value zero onto the stack, but to do this we do not need to move zero to a general purpose register because MIPS has a $zero register which is fixed to the value zero. On MIPS there isn’t a Push or Pop assembly instruction as on x86, we need to simulate these operations with store/load instructions followed by adding to the stack pointer register using the Addi instruction.
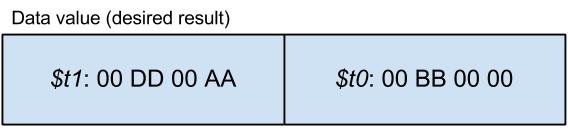
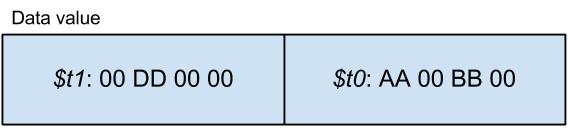
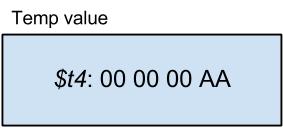
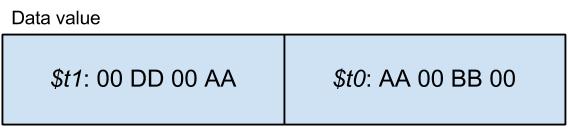
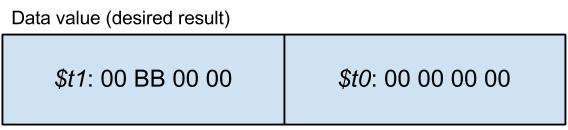
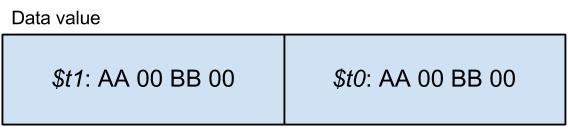
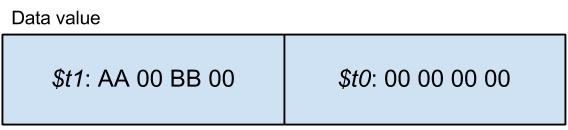
There is another important thing to keep in mind when programming on MIPS. Data stored in memory must be aligned in such a way that an object’s address must start at a value that is some multiple of their own size in bytes, e.g. a 4-byte word must be 4-byte aligned but a single byte needs no alignment (a.k.a. single byte alignment). So if we want to load from/store to memory using an offset, we need to either make sure the data is aligned or access the data in multiple parts to avoid the alignment issues.
We never need to worry about this when accessing the stack through $sp or $fp since the compiler guarantees these are always 4-byte aligned. For other memory accesses, the FlingOS Compiler does not require memory to be aligned (for compatibility with other architectures). Instead, it uses runtime checks to load memory from or store memory to unaligned addresses. This means C# code can be written more generically, with less for the programmer to worry about but does create a small performance hit at runtime.
What’s next?
What we would like to do during the remainder of this summer is to add a unit testing framework to the project that formalises test cases for current and possible future architectures. This way we can ensure that the current supports for x86 and MIPS are stable and also, if the project is to be extended with a new target architecture library, then implementing that library can be done in an efficient way which is easily testable.
Thank you for reading this and if you are interested in the upcoming Launch Event then please subscribe on the FlingOS homepage.
See you soon…
Roland